I was intrigued by the seemingly endless stream of stories of woes with the DYS SN20A (eg RCTimer / DYS Mini SN20a / SN30a / SN40a esc), so I purchased one to see if they are all bad. Of course, impressions of a sample of size one are of somewhat limited value, but it seemed like an interesting thing to do.
Some reports of problems seem to relate to use of BLHeli on the ESCs, and it seems at least one beta release of BLHeli v14 had defects that resulted in serious damage in unprotected tests.
Discussion blames problems on front ends, flight controllers, wiring, motors, ESCs hardware, firmware, and bootloaders… but all these possible causes evident more so with this one ESC does not seem likely or logical. With the quest for more rapid FC loop response, there is a risk of instability and the drive may be working harder with oscillating demand, only logs from a flying craft will reveal what may be happening in that respect.
The test ESC
The DYS SN20A was purchased 14/06/2015 from RCTimer for about US$19 inc post. Not an inexpensive ESC by any means.
The DYS SN20A is described as an “opto” but I doubt it is optically coupled, it is probably just another instance of the fraud in terminology where opto refers to a BECless ESC. (If it were optically coupled, it would almost certainly not be a bidirectional servo interface and the SimonK bootloader would not work… but it did.)
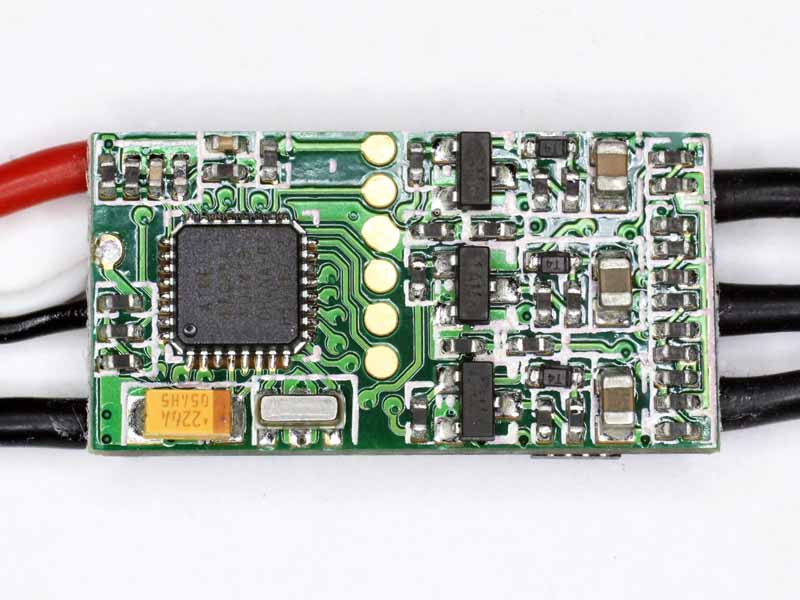
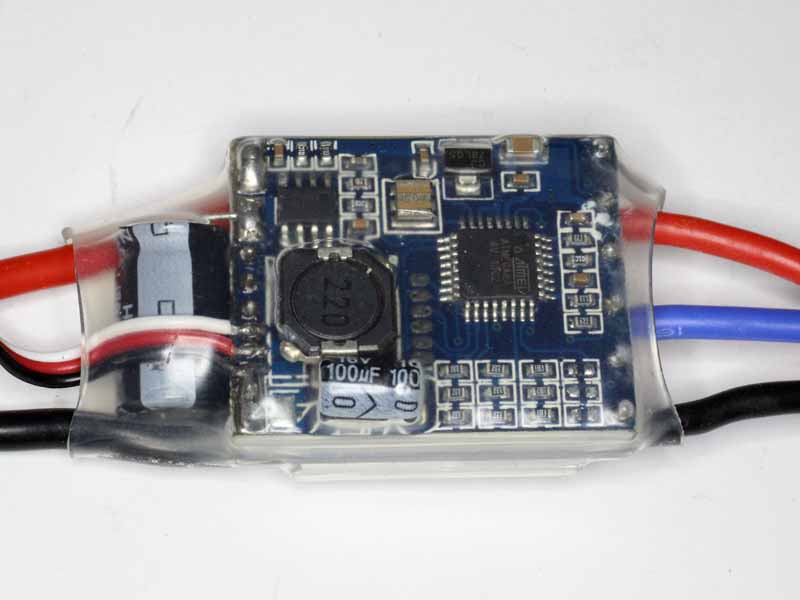
 Above, the top view of an unwrapped SN20A. Continue reading DYS SN20A out of the box
Above, the top view of an unwrapped SN20A. Continue reading DYS SN20A out of the box
Last update: 25th September, 2015, 4:33 PM