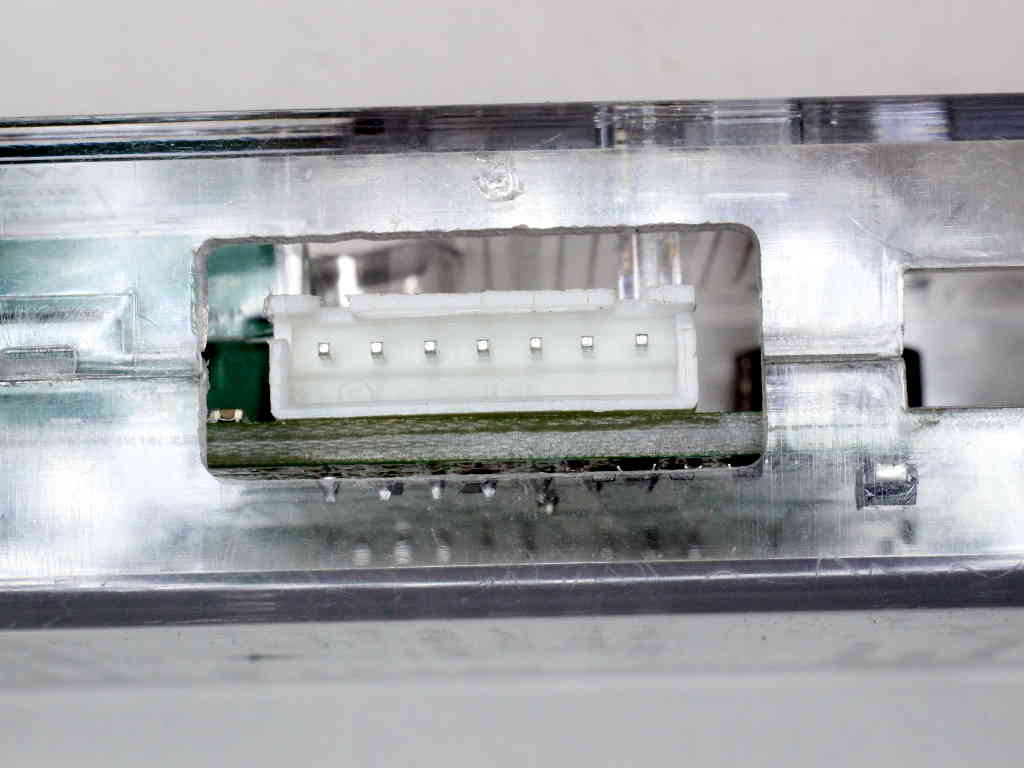
A recent purchase of an inexpensive ($6) speaker polarity tester prompted a need for a stand alone driver for speakers.

Above, the tester has a microphone that senses the polarity of the pressure wave and indicates with one of two LEDs.
The tester comes with a CD containing a file that can be used to provide the test signal on a complete system with CD player, but there is a need for a stand alone driver for testing bare speakers or speaker units.
Speaker tick generator (for polarity testing) described a stand alone test pulse generator based on re-purposing a brushless DC motor controller (ESC, used for RC models).
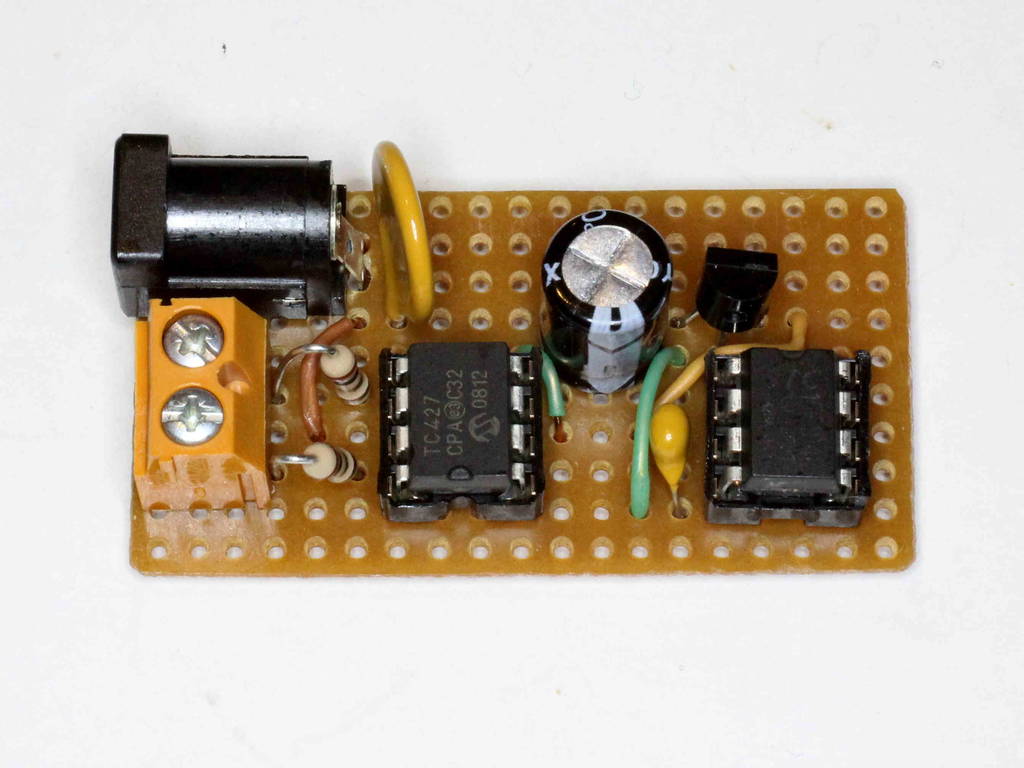
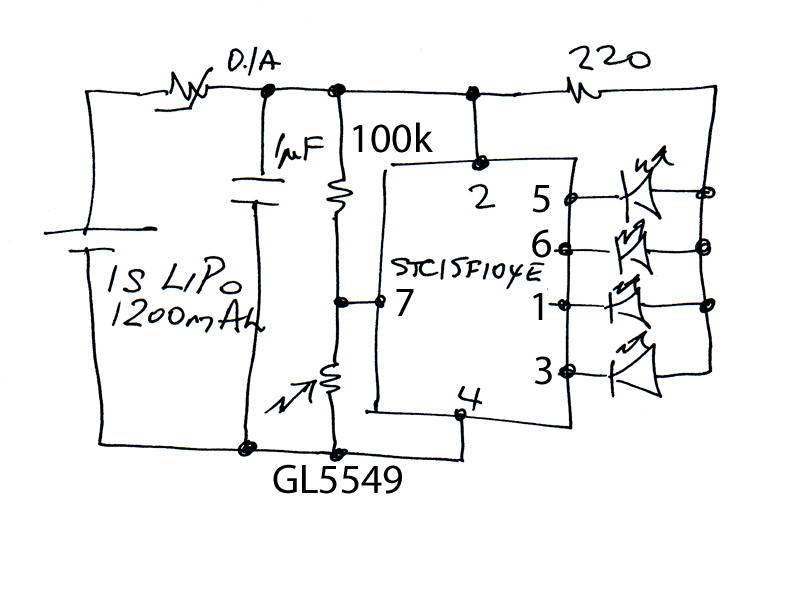
This article describes a simple tick generator using a inexpensive 8051 type MCU (STC15F104E) and a H-bridge IC (TC427).

Above, the prototype was build on a small piece of Veroboard. DC input of 6-15V is applied to the 2.1×5.5mm DC jack, and speaker output is on the screw terminals (nearest to DC jack is -ve). Continue reading Speaker tick generator #2 (for polarity testing)
Last update: 28th July, 2019, 6:36 AM
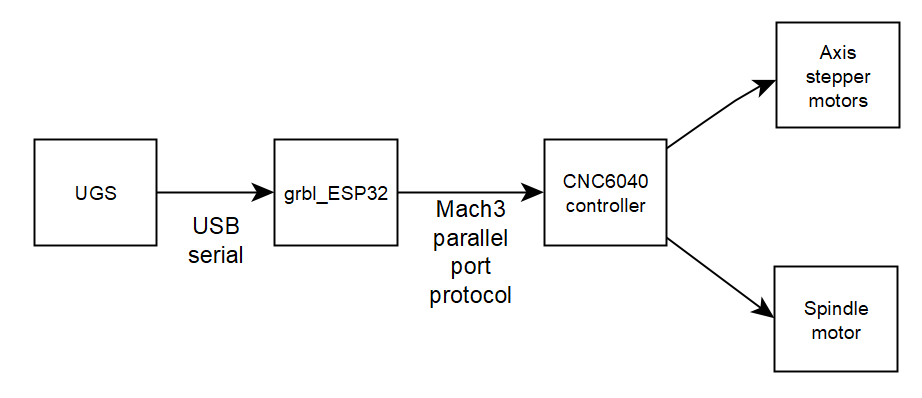 Above is the system block diagram. The grbl_ESP32 gcode interpeter processes a gcode S (speed) command, converting it to a variable duty cycle PWM waveform on parallel port pin 1. Continue reading CNC6040 router project – spindle speed linearisation – using new grbl_ESP32 feature
Above is the system block diagram. The grbl_ESP32 gcode interpeter processes a gcode S (speed) command, converting it to a variable duty cycle PWM waveform on parallel port pin 1. Continue reading CNC6040 router project – spindle speed linearisation – using new grbl_ESP32 feature