G4YDM described his balun at Ham Radio – What Is a Balun and How to Make One Cheaply.
With a title like that it is sure to have wide appeal, but it isn’t anything too novel, it is simply an air solenoid of 50Ω coax cable as a common mode choke, commonly known as an Ugly Balun.
He gives some instructions for one of several constructions:
When wrapping your coax around the pipe don’t use too much force as it may damage the inner braid and space the turns away from each other by a millimetre or two. R-G-2-1-3 coax around 21 feet used with 5 inch pipe will handle 400 watts pf power.

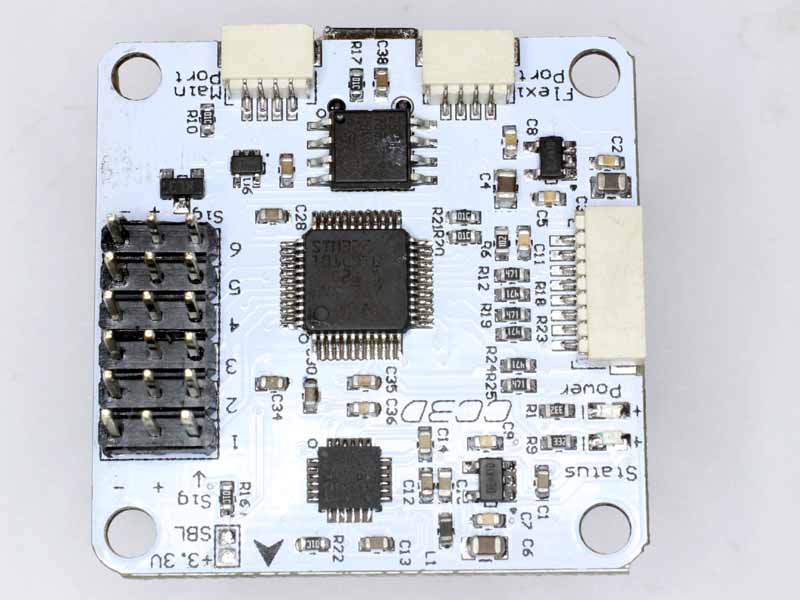
Above is a pic of the third construction which appears to be 21′ of RG213 on a 5″ PVC former:
He gives some performance measurements adjacent to the pic above:
Using a dummy load connected to the choke and transmitting 100 watts from my transmitter indicated an S.W.R. readings of around 1.5 to 1 at 3.5 Megahertz when testing 28 Megahertz the S.W.R. reading came down to 1.1 to 1 which is an excellent match. …
The test described above seems to simply be a dummy load connected to one end of 21′ of RG213 and the transmitter with VSWR meter feeding the other end. To be meaningful we need to know the impedance of the dummy load, indeed to be meaningful it needs to be 50Ω, so lets assume that is the case. Continue reading G4YDM balun