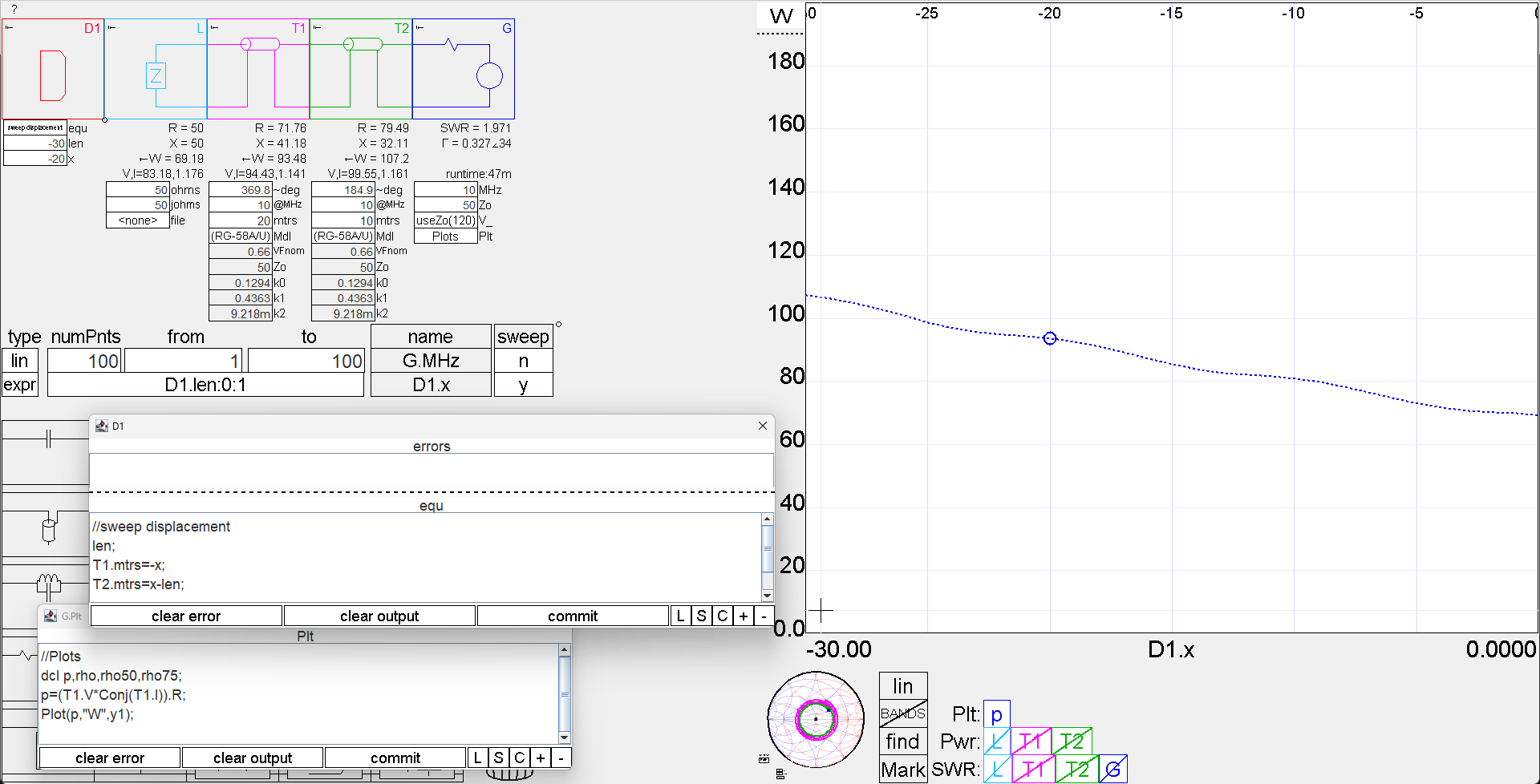
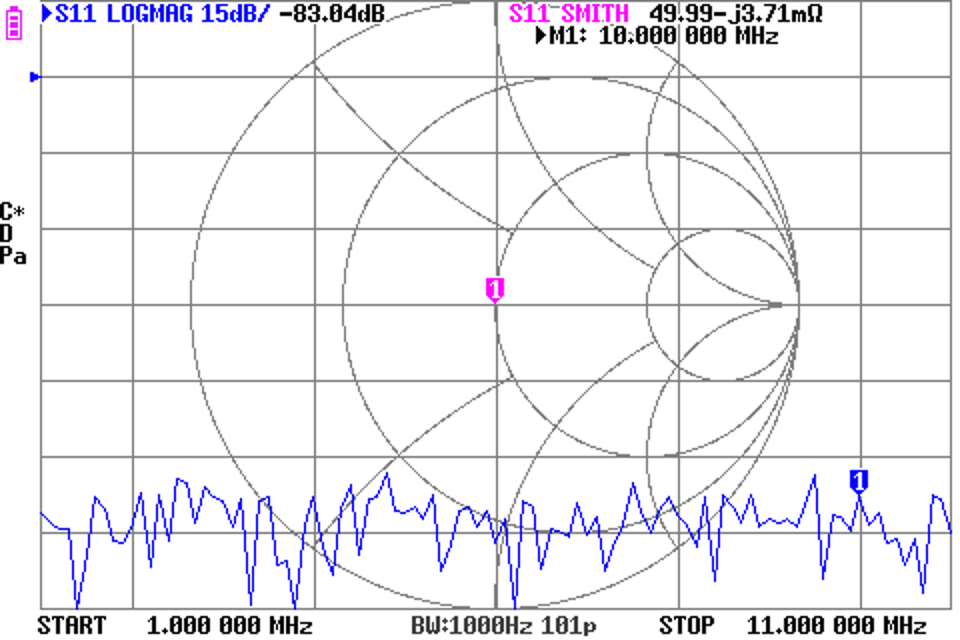
Power standing wave null… more left readers with “homework” to create the Pfwd and Prev traces.
Remember that Pfwd and Prev are interpretations in the context of some Zref of V and I and a point, and that \(P=P_{fwd}-P_{rev}=V_{fwd}I_{fwd}-V_{rev}I_{rev}\) is valid ONLY if Zref is purely real.
So let’s plot Pfwd and Prev wrt:
- Nominal Ro (ie the real part of the nominal Zo of the RG58A/U at 10MHz);
- 50Ω; and
- 75Ω to demonstrate the effect of different contexts, ie Zref.
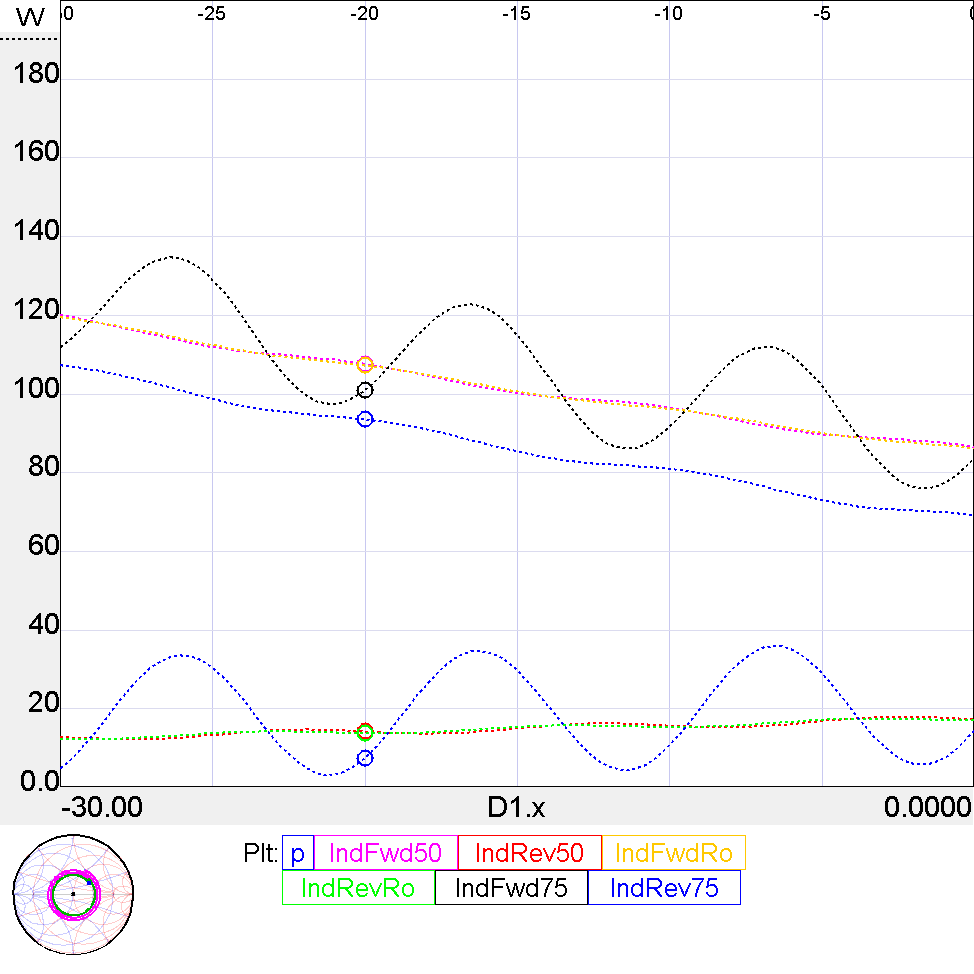
Above IndFwd50 and IndFwdRo are almost coincident (at 10MHz Nominal Ro is very close to 50Ω), as are IndRev50 and IndRevRo. IndFwd75 and IndRev75 are separated from the others. In all cases, the IndFwdxx-IndRevxx is equal to p. Continue reading Power standing wave null… solution