I have a problem with machine tools getting condensation on them when conditions in the shed read dew point.
A possible solution being explored is to circulate air with a fan, possible inducting outside air, when humidity approaches condensing conditions.
A quick search reveals the HDS10 resistive humidity sensor for a dollar or so on eBay.
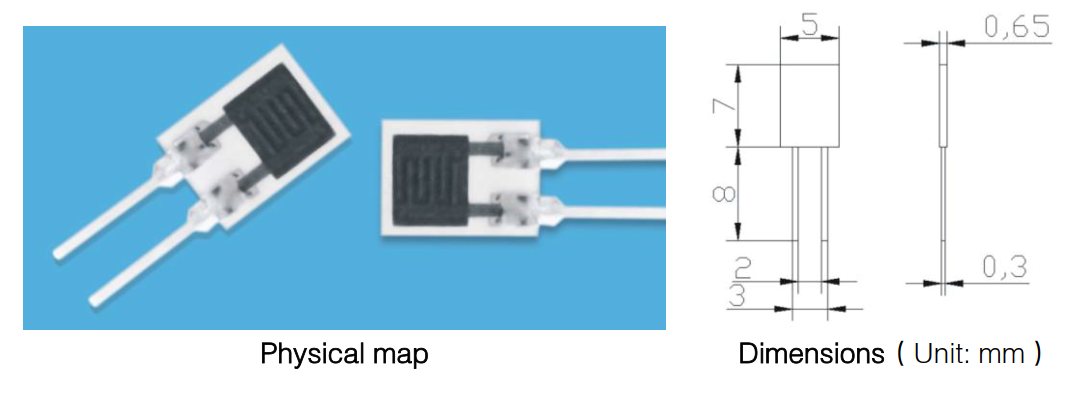
Above is the HDS10 humidity sensor.
Most low cost humidity sensors use a humidity dependent capacitive element, the HDS10 is different in being a humidity dependent capacitive element and is therefore simpler to use with microcontrollers with ADC input.
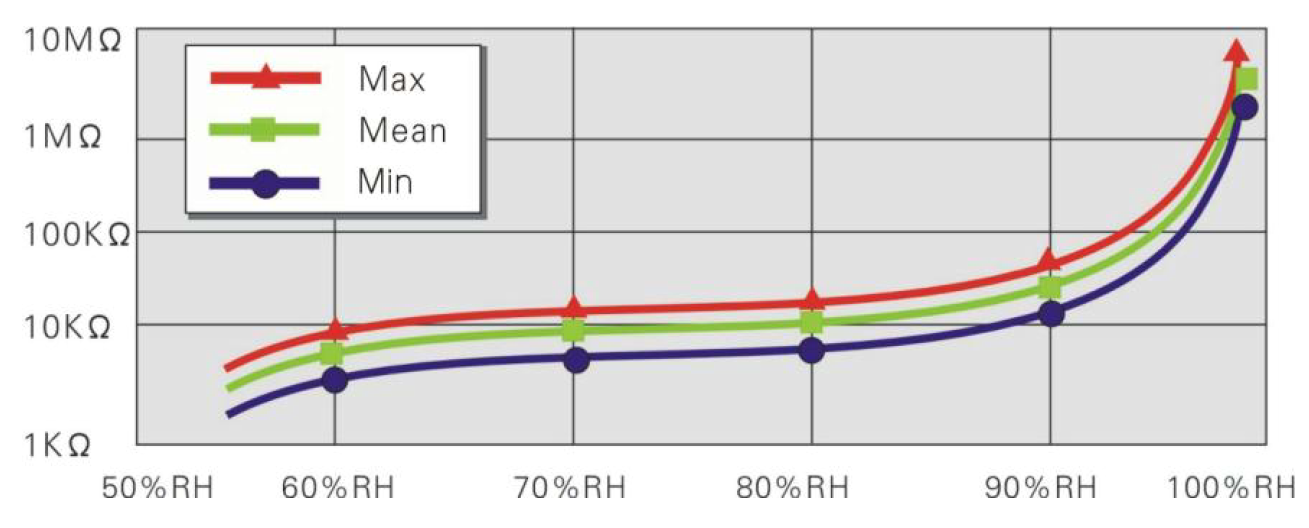
The above graph is from the datasheet. It is intended primarily for sensing high humidity (dew point, condensing conditions) which suits this application.
Continue reading Fan controlled by humidity sensor