| OwenDuffy.net |
|
This article is a collection of build notes for my X450 quadcopter project. The size is 450mm diagonal between motor shafts.
|
|
Key elements of the configuration are:
The mass of the fully populated quad is ~1300g.
|
|
Above, some different prop adapters to suit 5mm shaft and M8 thread were found on eBay.
|
|
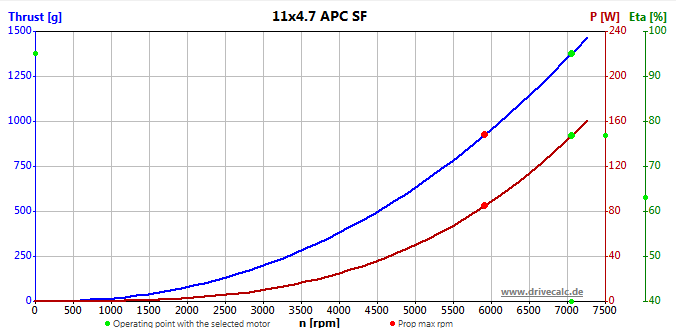
Fig 2 shows the characteristics for a similar 1147 SF propeller. The green dots are for an operating point of 1377g thrust for each propeller at 10.0V (WOT on a flat battery), and the indicated motor power is 147W at is 7060RPM.
At 8.3V, the motor should achieve about 6,310RPM and about 375g of thrust which would accommodate a payload of perhaps 750g with reduced performance. Under these conditions, motor output power would be about 40W each, DC current about 6A each or 24A in total (10C) and motor dissipation around 20W each. Overall, operation at that power is well within the limit of the battery current, mission time is dramatically reduced.
|
|
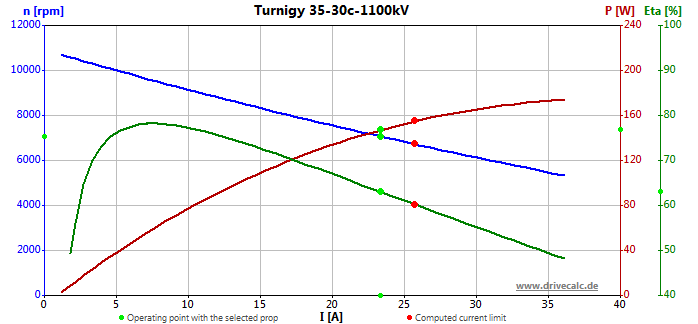
Fig 3 shows the loaded motor characteristics. The green dots are for an operating point of 1377g thrust for each propeller at 10.0V (WOT on a flat battery), and the indicated motor power is 234W at is 7060RPM. The efficiency scale (eta or η) may be optimistic as the model does not properly take into account the efficiency impact of PWM operation where shorter pulses of higher current create more winding loss than the DC equivalent current.
The following are notes on the construction. Some issues were noted during initial build, some a little later.
|
|
| Channel | Use | FC pin | Tx | Comment |
| 1 | Throttle | THR | Thr | |
| 2 | Roll | ROLL | Ail | |
| 3 | Pitch | PITCH | Ele | |
| 4 | Yaw | YAW | Rud | |
| 5 | Aux1 | AUX1 | THR | |
| 6 | Mode | AUX2 | 3POS | |
| 7 | Discovery beeper | NC | AIL | |
| 8 | Spare | NC | GEA | Vibration capture |
Table 1 shows the receiver connections.
| FC pin | Motor | Comment |
| 1 | Right front | |
| 2 | Left rear | |
| 3 | Left front | |
| 4 | Right rear |
Table 2 shows the ESC connections.
| Bluetooth pin | FC pin | Comment |
| Vcc | GND | |
| Gnd | 5V | |
| Rx | RX1 | |
| Tx | TX0 |
The quad uses nominally 11"x4.7" slow fly two blade propellers. These are available from a range of sources, and initially the cheap ABS plastic ones have been used.
The motors included propeller mounts with collets to suit the 5mm plain shafts. Propellers needed to be reamed out to M8 to suit the adapters, adapter nuts are (non-ISO) 14mm AF.
Power distribution is a Hobbyking distribution board with XT60 connector for the battery and four way 3.5mm connectors for the ESCs.
|
|
Figs 6 shows the Orange R920X receiver.
The quadcopter uses Hobbyking 40A ESC 4A UBEC 9261000003 with BEMF caps removed (necessary for some motors on this ESC with SimonK).
 |
Fig 7 shows the Hobbyking 40A ESC 4A UBEC 9261000003 (BEMF caps removed from pads at lower right).
Current version: 6dbc056a71161593cc8eaf08f8959cf4ea6e4ce6 bs_nfet_mw.hex 26/02/15
For this application:
.equ MOTOR_ADVANCE = 15 ; Degrees of timing advance (0 - 30, 30 meaning no delay) .equ TIMING_OFFSET = 0 ; Timing offset in microseconds (max 4096µs) |
It delivers better drive system efficiency, and faster / finer resolution control.
The motors are Turnigy Turnigy D3530-14 1100kv Brushless Motor, specifications:
Battery: 2~4 Cell /7.4~14.8V
RPM: 1100kv
Max current: 22A
No load current: 1.6A
Max power: 315W
Internal resistance: 0.077 ohm
Weight: 73g (including connectors)
Diameter of shaft: 5mm
Dimensions: 35x30m
Prop size: 7.4V/12x6 14.8V/8x4
Max thrust: 1100g
Poles: 14
A static thrust test was conducted at 10V (low limit for a 3S battery). Experience is that a quadcopter needs 2g excess thrust to safely and quickly land at the low battery limit. Since the craft mass is 1300g, its gravitational force is ~13N, and 300% thrust is 39N, 9.8 per motor. Static thrust was measured at 21.1N on 10V @ 24.1A (per motor), 7100RPM. Total current of 100A from a 4Ah battery requires at least a 25C battery.
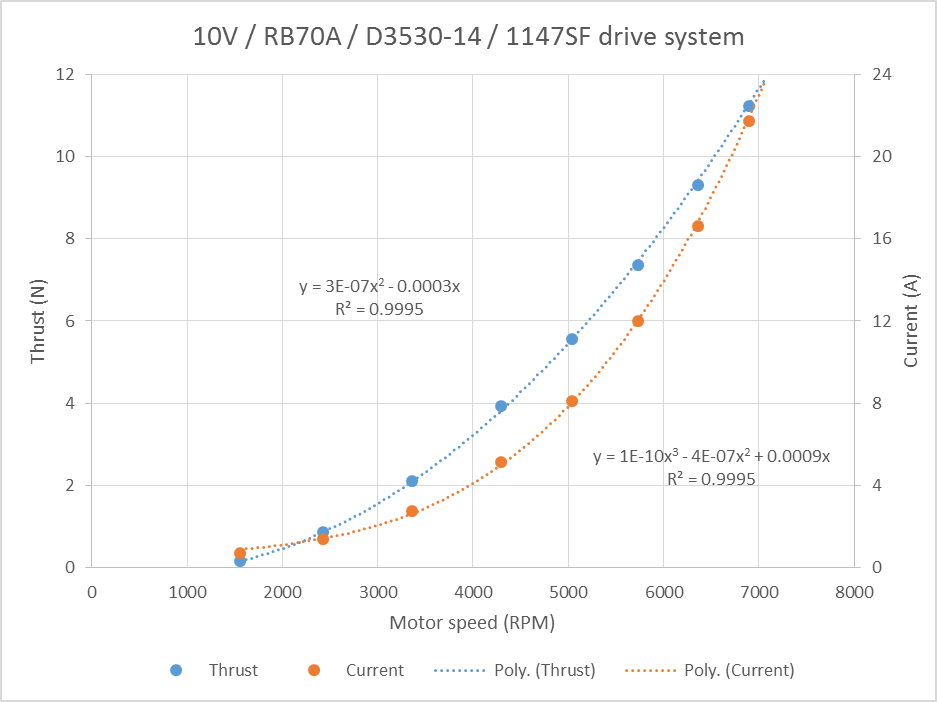 |
Fig 8 shows static measurement of current and thrust and current of a single motor at 10.0V (motor tested with RB70A as it was on hand).
The graph indicates hover thrust (3.3N) is delivered at 4000rpm with 4.2A per motor giving an endurance of 14min on a 4Ah battery (at 10V).
These measurements reconcile quite well with the DC3.4 prediction presented earlier.
Crash damage has mostly been to the propellers which seem reasonably robust... but they are breakable.
A couple of spare frames were purchased to provide spares.
| Version | Date | Description |
| 1.01 | 19/03/2015 | Initial. |
| 1.02 | ||
| 1.03 | ||
| 1.04 | ||
| 1.05 |
© Copyright: Owen Duffy 1995, 2021. All rights reserved. Disclaimer.