| OwenDuffy.net |
|
This article is a collection of build notes for my Q450 quadcopter project.
The project is a rebuild of the Q450 quadcopter (15/12/2015 build), key changes are:
Key elements of the configuration are:
The mass of the fully populated quad is ~1200g.
The size is 460mm diagonal between motor shafts and it can swing props up to about 11", though gear in the middle may limit propellers to something less. This project uses 10" propellers.
|
|
Fig 1 shows the built quadcopter.
|
|
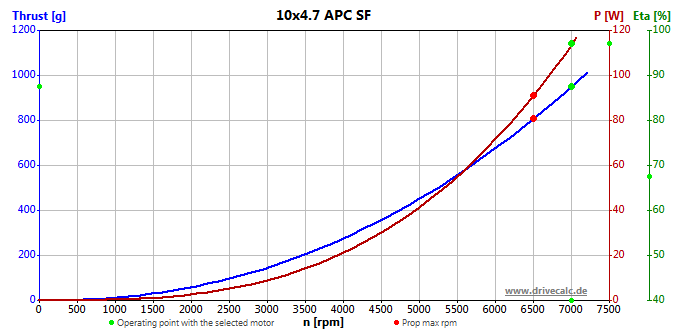
Fig 3 shows the characteristics similar to the the HK 1045 SF propeller. The green dots are for an operating point of 950g (9.5N) thrust at WOT for each propeller, and the indicated motor power is 114W at is 7,006RPM.
Expected hover is at around 4,500RPM for around 360g (3.6N) thrust per propeller at about 4A current for each motor. Endurance should be 10min+ on a 3Ah battery.
The following are notes on the construction. Some issues were noted during initial build, some a little later.
|
|
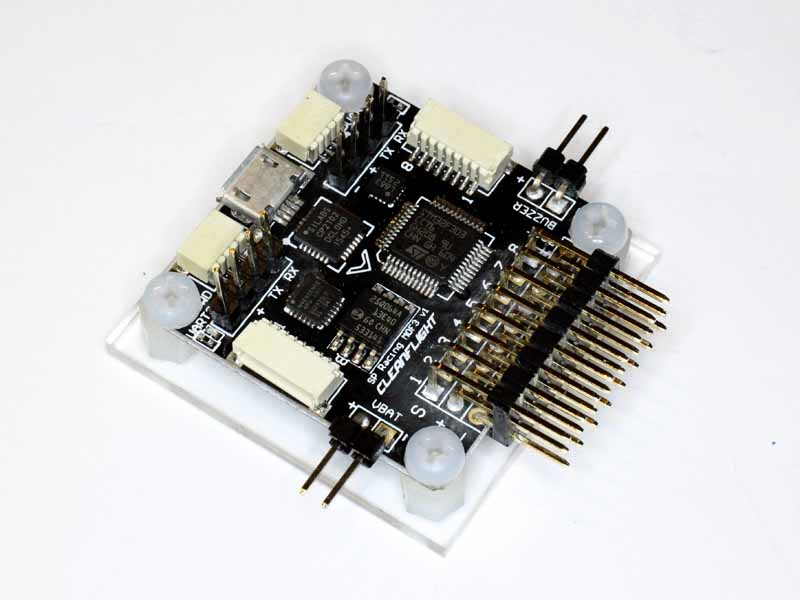
Fig 4 shows the FC.
|
|
Fig 4a shows the FC which is mounted to a small square of acrylic which is foam mounted to the frame. A 15mm square of medium density open cell foam was placed between the barometer and acrylic base to improve ALT HOLD stability.
|
|
Fig 4b shows the FC in the frame.
The quad uses nominally 10"x4.5" two bladed slow fly propellers. These are available from a range of sources, and initially the cheap ABS plastic ones have been used.
The motors included propeller mounts with collets to suit the 4mm plain shafts, and M6 threaded extension for the propeller.
Power distribution uses the frame's integral distribution board. The ESCs are soldered to the distribution board.
Features include:
Variations:
| Channel | Use | FC pin | Tx | Comment |
| 1 | PPSUM | 3 |
Table 1 shows the receiver connections.
| FC pin | Motor | Comment |
| M1 | Left rear | |
| M2 | Left front | |
| M3 | RIght rear | |
| M4 | Right front |
Table 2 shows the ESC connections.
| Bluetooth pin | FC pin | Comment |
| Vcc | +5 | |
| Gnd | Gnd | |
| Rx | Tx | |
| Tx | Rx |
Table 3 shows the Bluetooth connections. Connection protocol is 115,200,8,n,1.
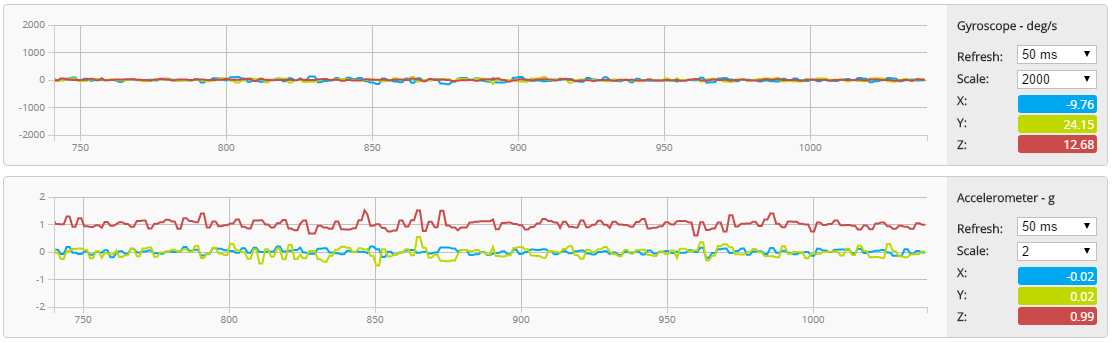 |
Fig 5 shows the configuration tool sensor screen with the quad hovering but loosely held in the hand. The purpose of this test was to evaluate the residual vibration sensed by the board.
|
|
Figs 6 shows the Orange R920X receiver.
An inexpensive Hextronix Bluetooth module was connected for field tuning purposes using a smartphone app. The module was configured for name Q21, 115,200bps, 8n1.
The F-30A ESCs were upgraded to tgy (SimonK) bootloader + tgy bs_nfet.hex firmware.
Current version: 1e4c01782eff85da3971f628a3bd599b7a0725eb bs_nfet_mw.hex 18/10/15
For this application:
.equ MOTOR_ADVANCE = 15 ; Degrees of timing advance (0 - 30, 30 meaning no delay) .equ TIMING_OFFSET = 0 ; Timing offset in microseconds (max 4096µs) |
The motors are Turnigy D2836-8 1100Kv brushless DC motor, specifications:
Battery: 2~4 Cell /7.4~14.8V
RPM: 1100kv
Max current: 18A
No load current: 1A
Max power: 336W
Internal resistance: 0.107 ohm
Weight: 70g (including connectors)
Diameter of shaft: 4mm
Dimensions: 28x36m
Prop size: 7.4V/11x7 14.85V/7x3
Max thrust: 1130g
The D2836-8 enclosed leaflet Kv=950, the motor measures 1120Kv on 3S.
Turnigy 5000mAh 10C.
A Turnigy TGV-Detector was used to warn of low battery. Several of these were purchased, and they are fitted with a 2.54mm shunt to go on 2mm pitch header pins resulting in a loose and intermittent / unreliable connection. More Hobbyking quality!
The TGV-Detector was fitted with a 2mm shunt, and it performs reliably though at the first audible alarm it is vital to get the quad down within 15s, it isn't much of an early warning.
A static thrust test was conducted at 10V (low limit for a 3S battery). Experience is that a quadcopter needs 2g excess thrust to safely and quickly land at the low battery limit. Since the craft mass is 1200g, its gravitational force is ~12N, and 300% thrust is 36N, 9 per propeller. Static thrust was measured at 9.2N on 10V @ 19.2A (per motor), 7250RPM. Total current of 80A from a 3Ah battery optimally requires a 30C battery.
Hover will require about 3N and that was achieved on 10V @ 4A (per motor), 4250RPM. At a total hover current of 16A (worst case), endurance on a 3Ah battery should be about 12min.
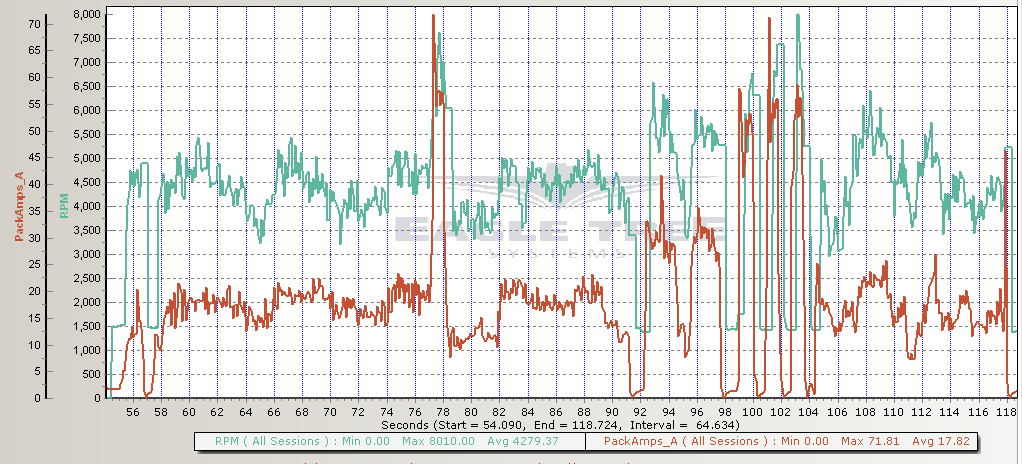 |
Fig 7 shows a test of the quad at 12.0V. There was 0.6A current drawn by the four ESCs and FC with the motor OFF, so 0.6A needs to be deducted from the figures in the graph.
Expected hovering rpm is around 4,300, avg motor current consumption was 17.5-0.6=16.9A.
A series of full stick accelerations was conducted, and current peaked at 72A, rpm peaked at 7,600.
 |
Fig 8 shows static measurement of current and thrust and current of a single motor at 10.0V.
Crash damage has mostly been to the propellers which seem reasonably robust... but they are breakable.
A couple of spare frames were purchased to provide spares.
| Version | Date | Description |
| 1.01 | 30/06/2016 | Initial. |
| 1.02 | ||
| 1.03 | ||
| 1.04 | ||
| 1.05 |
© Copyright: Owen Duffy 1995, 2021. All rights reserved. Disclaimer.