| OwenDuffy.net |
|
This article is a collection of build notes for an X230 quadcopter project.
|
|
Fig 1 shows the assembled X230 quadcopter in X configuration
Key elements of the configuration are:
The mass of the fully populated quad is 460g, for design purposes a mass of 500g will be used to allow margin for a battery monitor, variation in battery mass, trainer accessories etc.
To minimise expensive crash damage. PhoenixRC has been used to acquire controller experience.
|
|
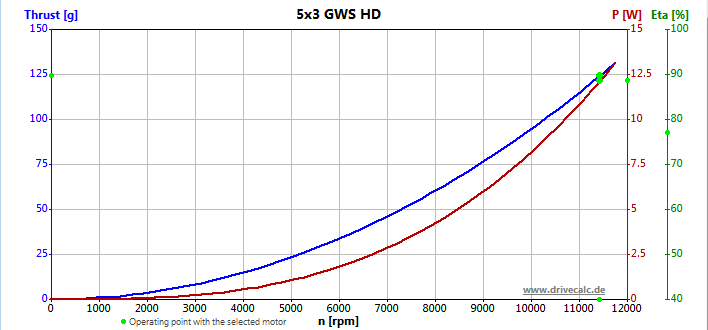
Fig 1 shows the characteristics for the GWS 5x3 propeller. The green dots are for an operating point of 125g thrust for each propeller, and the indicated motor power is 12.3W at is 11,400RPM. The efficiency scale (eta or η) is for a similar but not identical motor on reduced voltage, and is optimistic as the model does not properly take into account the efficiency impact of PWM operation where shorter pulses of higher current create more winding loss than the DC equivalent current.
Power consumption was measured with the fully populated X230 (though with no additional payload) at 5.7A and 465g in the hovering state. Indicated motor+ESC efficiency is 4*12/5.7*12=48/68.4=70%.
More current is required to climb vertically, but the quad should climb at a modest rate at that current with modest lateral velocity (due to increased lift because of the lateral movement).
At 11.0V, the motor should achieve about 15,500RPM and about 230g of thrust which would accommodate a payload of perhaps 300g with reduced performance. Under these conditions, motor output power would be about 30W each, DC current about 8A each or 32A in total (25C) and motor dissipation around 30/0.6-30=20W each which is quite high for its size. Overall, operation at maximum power is at the limit of the battery current, mission time is dramatically reduced, and it is likely to quickly overheat motors and ESCs. The power reserve is more practically used for agility than as a mule.
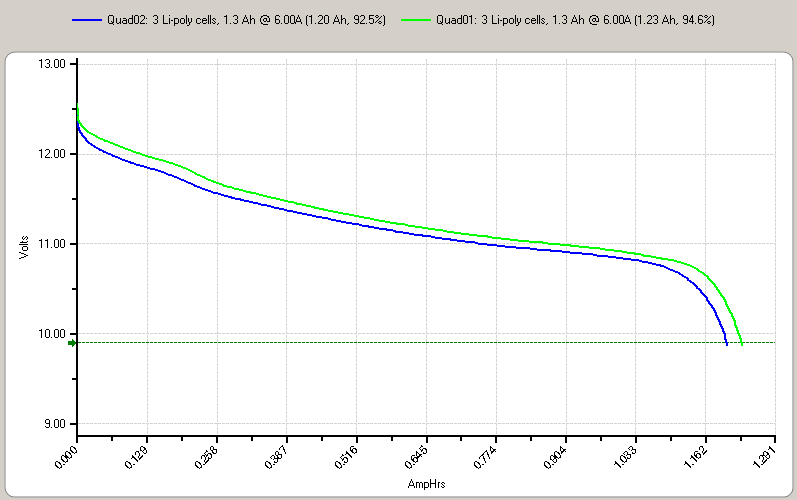 |
Fig 3 is a load test of two of the Turnigy nano-tech 1.3Ah 3S LiPo batteries. At 1.2Ah capacity, run time is 1.2/6.0=0.2h=12min. Allowing a safety factor, planned mission time should be less than 10min on a fully charged battery.
The following are notes on the construction. Some issues were noted during initial build, some a little later.
The propellers supplied with the kit were good quality GWS 5x3 three blade ABS propellers with 3mm bore to suit the M3 motor shaft.
The only stock replacement from Hobbyking (and these are consumable parts) was a lower quality clone with 5mm bore and adapters. Lower quality because some of the blades on some propellers were distorted and they were thrown out.
The supplied hardware for mounting the propellers on the M3 motor shaft was a nut to go under the propeller, and a plain washer and nyloc nut to go on top of the propeller. This system wasn't very good for the supplied propeller, it really needed a locknut added to the lower nut to fix its position on the shaft... more parts needed!
A simple and effective mounting option is to obtain some 'penny washers', 3mm ID, 9mm OD, above and below the propeller as they grip the propellers with the adapter bush.
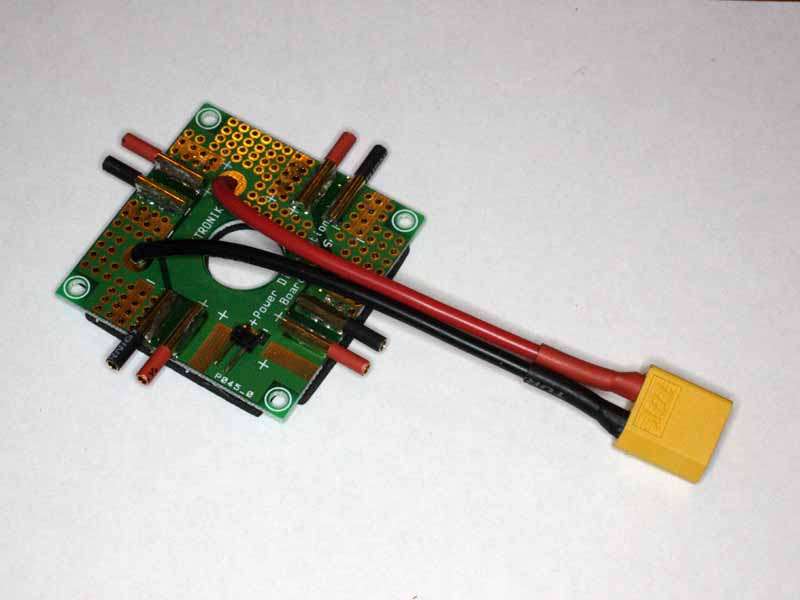 |
The supplied power distribution board was deemed pretty inadequate and replaced. Fig 4 shows the replacement power distribution board (a Hobbyking product, not very expensive and good value) to replace to rather poor one supplied in the kit.
A Hextronic MultiWii 3U24 flight controller board was chosen intially as it had the gyros, accelerometer, barometer and magnetometer on board and a native USB interface. It turns out that this was a bad choice as the native USB implementation uses almost 4kB of flash memory and prevents activation of some desirable system features.
The MultiWii 32U4 board has onboard MPU-6050 (GYRO/ACC), HMC-5883L (MAG), and MS5611-01BA03 (BARO).
The flight controller board came with no documentation, no schematic and inadequate information as to the settings in the configuration config.h to build the appropriate flash module.
The board malfunctioned after a modest crash and was replaced with a MultiWii 328P Flight Controller w/FTDI & DSM2 Port. It turned out the board malfunction was due to a solder ball shorting pins, the result of poor quality control at HobbyKing.
Features include:
The flight controller board came with no documentation, no schematic and inadequate information as to the settings in the configuration config.h to build the appropriate flash module.
diff -r 841af04b3e00 config.h --- a/config.h Wed Apr 10 07:44:41 2013 +1100 +++ b/config.h Tue May 07 08:29:08 2013 +1000 @@ -34,1 +34,1 @@ - //#define QUADX + #define QUADX @@ -93,1 +93,1 @@ - //#define FREEIMUv043 // same as FREEIMUv04 with final MPU6050 (with the right ACC scale) + #define FREEIMUv043 // same as FREEIMUv04 with final MPU6050 (with the right ACC scale) @@ -449,1 +449,1 @@ - //#define RCAUX2PIND17 + #define RCAUX2PIND17 @@ -703,1 +703,1 @@ - #define MAG_DECLINIATION 0.0f + #define MAG_DECLINIATION 12.5f @@ -724,1 +724,1 @@ - //#define LCD_TTY // SERIAL LCD: useful to tweak parameters over cable with arduino IDE 'serial monitor' + #define LCD_TTY // SERIAL LCD: useful to tweak parameters over cable with arduino IDE 'serial monitor' |
Above is a diff of a working config.h for MultiWii V2.2.
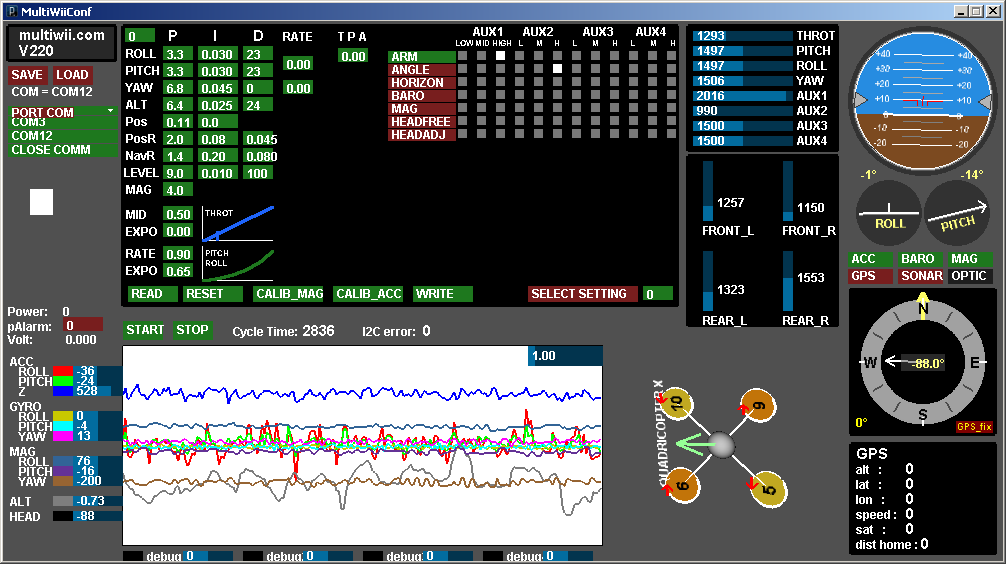 |
Fig 5 shows the voltage the MultiWiiConf configuration tool screen with the quad hovering but loosely held in the hand. The purpose of this test was to evaluate the residual vibration sensed by the board. The amplitude of the roll and pitch signals are mostly due to lower frequency wobble components than propeller vibration.
Following the supplied directions results in a PLUS configuration quad.
 |
Fig 6 shows the X build configuration so that the USB cable to the flight controller used can be attached when the propellers are running. The instructions show a simpler PLUS build, but there is merit in being able to observe the flight controller from a PC whilst the model supports itself.
A better option for parameter tuning is an inexpensive Bluetooth module, but Arduino will not open the Blutooth derived COM port.
A Orange receiver R615 was chosen for compatibility with the transmitter unit. It was straight forward, reliable and with dual diversity receive should be a good solution. The receiver was secured with velcro under the top plate of the assembly.
 |
Fig 7 shows replacement motor screws as the several of the original ones had malformed heads and could not be tightened... more parts needed!
More importantly, the supplied 5mm screws are long enough to contact and damage the motor windings and need spacer washers under the heads to prevent damaging the windings, particularly short circuiting the windings (which will cause overheating and low efficiency).
The ESCs were upgraded to tgy (SimonK) firmware, see ZTW A series 12A ESC.
It delivers better drive system efficiency, and faster / finer resolution control.
Initial trials with wii-esc were successful, and although it contains some better features, it was judged less robust than tgy. In a few instances during programming of the ESC flash resulted in excessive current drawn (though a current limited power supply was effective in preventing damage) which suggests that under some circumstances wii-esc may leave pins in an unsafe condition. tgy uses the watchdog timer to improve robustness, so that for example, even if the clock stops for some reason, the MCU will be reset quickly to prevent damage to ESC and motor.
2013-07-19: The ESCs have been loaded with a custom bs_nfet_ntc.hex flash module (which contains the TIMING_OFFSET parameter) and multiwii.tgy EEPROM image for throttle calibration. Timing parameters are as follows.
.equ MOTOR_ADVANCE = 10 ; Degrees of timing advance (0 -
30, 30 meaning no delay)
.equ TIMING_OFFSET = 25 ; Timing offset in
microseconds (max 4096µs)
Crash damage has mostly been to the propellers which are very fragile.
The nylon pillars used in the X230 are next most susceptible to damage, they are particularly fragile.
Frame parts and motors are not available (though they were when the original kit was purchased) and this potentially determines the service life of this quad.
 |
Fig 8 shows one of the frame elements replaced with a piece cut from a sheet of 1mm aluminium.
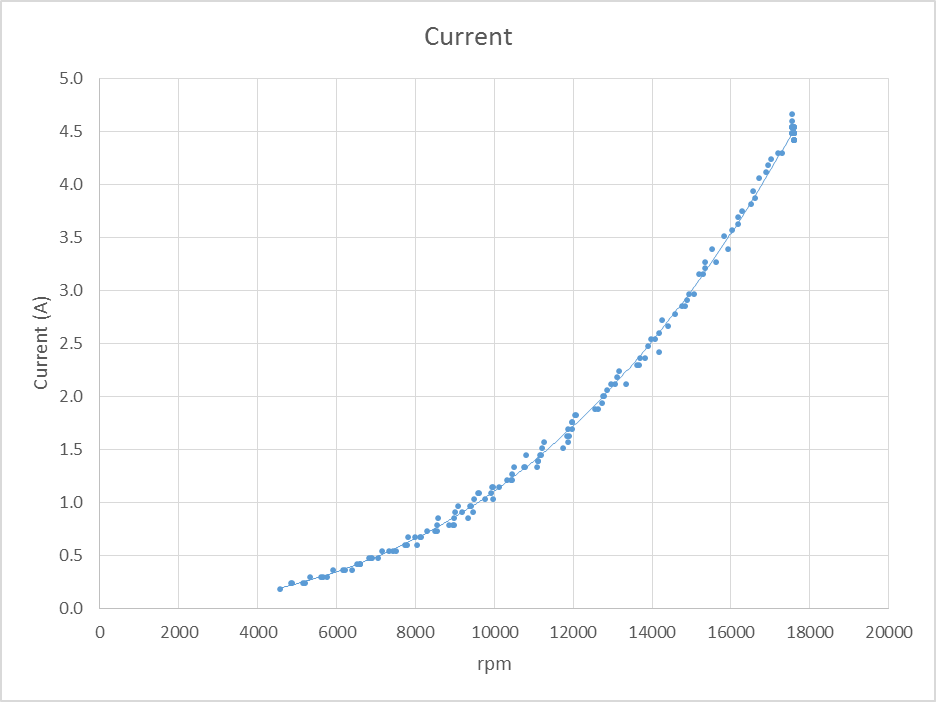 |
Fig 9 shows a plot of motor current vs speed for a single motor. Hover speed is around 11,400rpm, current is around 1.6A at that speed.
Maximum power input is 57W, maximum output power is likely to be around 41W. Hovering current is 1.6A, Pin 20W and Pout likely to be around 13W.
The X230 has been an interesting vehicle for learning.
It is very difficult to fly, the combination of small distance between propellers, high speed small propellers and medium mass give a vehicle that is hardly tame. Pilot inexperience is no doubt a factor in this, but a second quadcopter of larger frame size and 8" slow fly propellers has been a lot easier to fly.
With what I now know, I would not recommend the X230 kit.
| Version | Date | Description |
| 1.01 | 29/06/2013 | Initial. |
| 1.02 | ||
| 1.03 | ||
| 1.04 | ||
| 1.05 |
© Copyright: Owen Duffy 1995, 2021. All rights reserved. Disclaimer.