| OwenDuffy.net |
|
This article is a collection of build notes for my F330 quadcopter project. The frame size is 330mm diagonal between motor shafts, the frame kit branded "Fun Fly".
Key elements of the configuration are:
The mass of the fully populated quad was 860g.
The size is 330mm diagonal between motor shafts and it can swing props up to about 8".
|
|
Fig 1 shows the assembled F330 quadcopter in X configuration
|
|
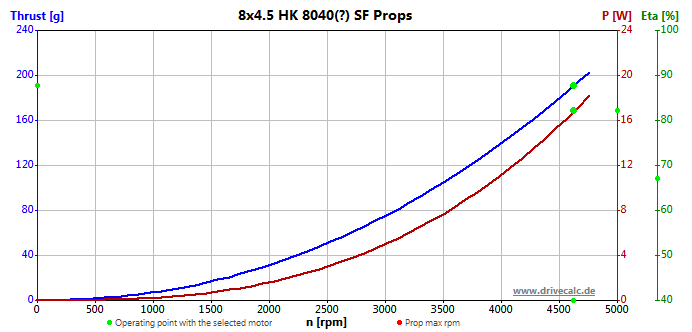
Fig 2 shows the characteristics for the HK 8040 SF propeller. The green dots are for an operating point of 190g thrust for each propeller, and the indicated motor power is 16.8W at is 4,626RPM. The efficiency scale (eta or η) is for a similar but not identical on reduced voltage, and is optimistic as the model does not properly take into account the efficiency impact of PWM operation where shorter pulses of higher current create more winding loss than the DC equivalent current. Nevertheless, input power for 4 motors on 11V should be a little above 100W, 10A has been allowed in battery endurance planning.
Power consumption was measured with the fully populated F330 (though with no additional payload) at 7.5A and 760g in the hovering state. Indicated motor/ESC efficiency is (16.8*4)/(7.5*12)=67/90=75%.
More current is required to climb vertically, but the quad should climb at a modest rate at that current with modest lateral velocity (due to increased lift because of the lateral movement).
At 8.3V, the motor should achieve about 6,310RPM and about 375g of thrust which would accommodate a payload of perhaps 750g with reduced performance. Under these conditions, motor output power would be about 40W each, DC current about 6A each or 24A in total (10C) and motor dissipation around 20W each. Overall, operation at that power is well within the limit of the battery current, mission time is dramatically reduced.
The motors are capable of 8,000RPM with these propellers on 11V, for maximum input power of 120W each, 44A (18C) in total, total thrust of 2400g.
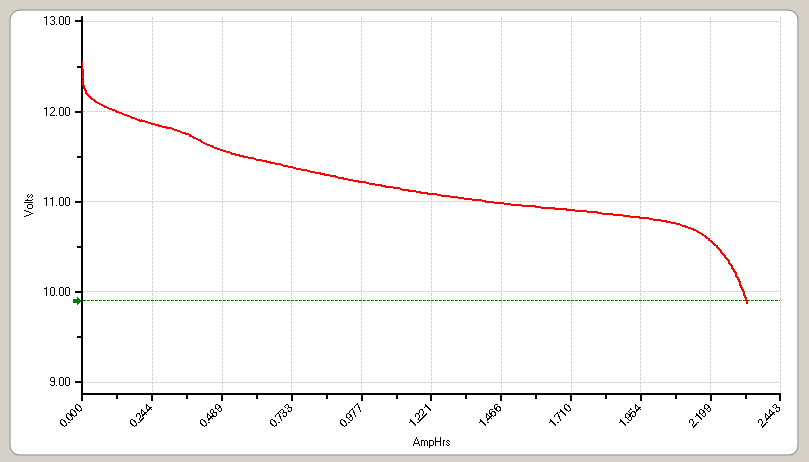 |
Fig 3 is a load test of the Zippy 2.45Ah 3S LiPo battery at 10A, a little higher than the expected hover current. At 2.3Ah capacity, run time is 2.3/10.0=0.23h=13.8min. Allowing a safety factor, planned mission time should be less than 10min on a fully charged battery.
The following are notes on the construction. Some issues were noted during initial build, some a little later.
The quad uses nominally 8"x4.5" slow two bladed fly propellers. These are available from a range of sources, and initially the cheap ABS plastic ones have been used.
Initial supply came from RCTimer, but they were hopelessly unbalanced needing about 3mm shaved of the trailing edge of one side.
The motors included propeller mounts with collets to suit the 3.2mm plain shafts and with M5 thread. The propeller nuts needed to be drilled out to 2.5mm to accommodate a reasonable strength SS wire for tightening.
Power distribution is a Hobbyking distribution board with XT60 connector for the battery and four way 2mm connectors for the ESCs.
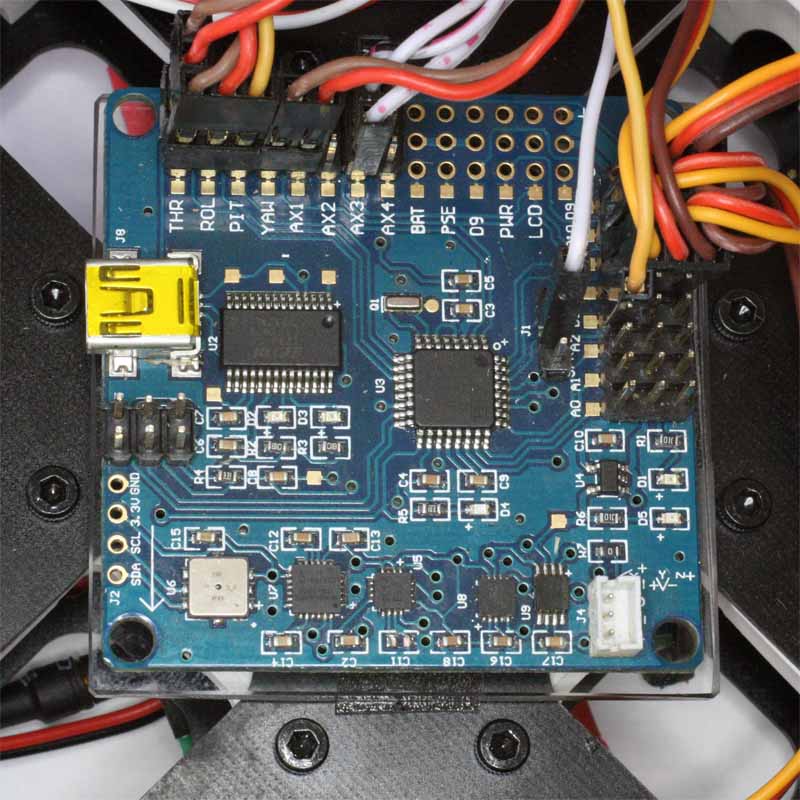 |
Fig 4 shows the flight controller. It is a Hextronik MultiWii 328P Flight Controller w/FTDI & DSM2 Port:
The flight controller board came with no documentation, no schematic and inadequate information as to the settings in the configuration config.h to build the appropriate flash module.
 |
Fig 5 shows the flight controller connections
| Channel | Use | FC pin | Tx | Comment |
| 1 | Throttle | THR | Thr | |
| 2 | Roll | ROLL | Ail | |
| 3 | Pitch | PITCH | Ele | |
| 4 | Yaw | YAW | Rud | |
| 5 | Aux1 | AUX1 | THR | |
| 6 | Mode | AUX2 | 3POS | |
| 7 | Discovery beeper | NC | AIL | |
| 8 | Spare | NC | GEA | Vibration capture |
Table 1 shows the receiver connections.
| FC pin | Motor | Comment |
| D9 | Right rear | |
| D10 | Right front | |
| D6 | Left front | |
| D5 | Left rear |
Table 2 shows the ESC connections.
| Bluetooth pin | FC pin | Comment |
| Vcc | GND | |
| Gnd | 5V | |
| Rx | RX1 | |
| Tx | TX0 |
Table 3 shows the Bluetooth connections.
diff.htm is a report of the differences between the distribution config.h and that used.
 |
Fig 6 shows the MultiWiiConf configuration tool screen.
A Frsky V8FRII HV was chosen. It was straight forward, reliable and with dual diversity receive and failsafe should be a good solution.
An inexpensive Hextronix Bluetooth module was connected for field tuning purposes using a smartphone app. The module was configured for name Q02 (COM52 on W09).
The F-20A ESCs had the BEMF capacitors remove and were upgraded to tgy (SimonK) bootloader + tgy firmware, see Hobbyking F-20A 20A ESC.
Current version: 1f75da384e5c83f83916aa752819ca6eed712565 bs_nfet_mw.hex 24/03/14
For this application:
.equ MOTOR_ADVANCE = 15 ; Degrees of timing advance (0 - 30, 30 meaning no delay) .equ TIMING_OFFSET = 0 ; Timing offset in microseconds (max 4096µs) .equ COMP_PWM = 0 ; During PWM off, switch high side on (unsafe on some boards!) /^\.equ RC_CALIBRATION/c\ .equ RC_CALIBRATION=0 ;disable stick calibration /^\.equ STOP_RC_PULS/c\ .equ STOP_RC_PULS=1140 ;Stop motor at or below this pulse length /^\.equ FULL_RC_PULS/c\ .equ FULL_RC_PULS=1860 ;Full speed for pulses longer than this |
It delivers better drive system efficiency, and faster / finer resolution control than the stock firmware.
Initial trials with wii-esc were successful, and although it contains some better features, it was judged less robust than tgy. In a few instances during programming of the ESC flash resulted in excessive current drawn (though a current limited power supply was effective in preventing damage) which suggests that under some circumstances wii-esc may leave pins in an unsafe condition. tgy uses the watchdog timer to improve robustness, so that for example, even if the clock stops for some reason, the MCU will be reset quickly to prevent damage to ESC and motor.
The motors are Turnigy D2830-11 1000kv Brushless Motor, specifications:
Zippy 3S 3000mAh 20/30C.
A Turnigy TGV-Detector was used to warn of low battery. Several of these were purchased, and they are fitted with a 2.54mm shunt to go on 2mm pitch header pins resulting in a loose and intermittent / unreliable connection. More Hobbyking quality!
The TGV-Detector was fitted with a 2mm shunt, and it performs reliably though at the first audible alarm it is vital to get the quad down within 15s, it isn't much of an early warning.
 |
Fig 7 shows a static test of the ESC + motor on a 20s sweep from 0% to 100% servo input on a regulated power supply at 12.6V. There was 0.48A current drawn by the four ESCs and FC with the motor OFF, so 0.48A needs to be deducted from the figures in the graph, and about 6W from the power graph.
Expected hovering rpm is around 5,700, actual current consumption was 2.9-0.48=2.42A.
The rpm and current did not sag at full power (>86% servo input) which is good, poorer motors will sag as the winding heats up though current at 13A is 62% of rated maximum, and more importantly, I^2 is only 38% of that at maximum rated current. There was some speed instability though at full power caused by frame vibration and turbulence in the test setup.
The servo signal is a linear ramp of 0 to 100% over 20s, so 5%/s. The ESC range is 1170 to 1860, which is 17% to 86% of the input signal. The rpm response curve is not exactly linear, but not too bad.
 |
Fig 8 shows a test of the ESC + motor.
Crash damage has mostly been to the propellers which seem reasonably robust... but they are breakable.
Several plastic legs have been broken broken in hard landings.
A couple of spare frames were purchased to provide spares.
| Version | Date | Description |
| 1.01 | 30/06/2013 | Initial. |
| 1.02 | ||
| 1.03 | ||
| 1.04 | ||
| 1.05 |
© Copyright: Owen Duffy 1995, 2021. All rights reserved. Disclaimer.