My first tricopter build is based on a frame from Hobbyking. they say:
Designed from the ground-up by our own engineering team, the X900 Tricopter is a culmination of months of design, testing and material sourcing to provide you with the perfect mix of quality, performance and value.
Oh well, with hype like that, the reality can only fall short!
The size is 820mm diagonal between motor shafts (not 900mm as the type suggests).
Key elements of the configuration are:
- Hobbyking X900 tricopter frame;
- Turnigy D3530-14 1000kv Brushless Motor;
- Hobbywing Skywalker 4S 40A ESC, loaded with BLHeli v11.0;
- HK 11×4.5 SF two blade propellers;
- Hextronic MultiWii 328P Flight Controller w/FTDI & DSM2 Port;
- FRSKY V8FR-II HV receiver;
- Battery monitor;
- Turnigy Discovery Beeper
- Zippy 3000mAh 3S 30C LiPo battery;
- Turnigy 9XR/OpenTx transmitter.
The frame has had its problems.

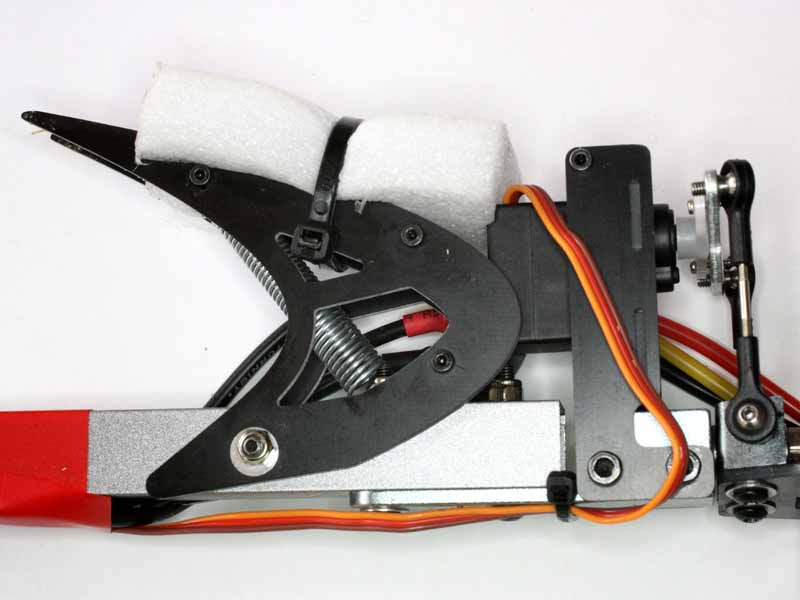
The springs used for the “shock absorbing landing legs” are low grade and straighten out when stretched by the legs, see above. Fundamentally, the leg design is flawed, the spring fouls the recommended tail servo and it fouls the mounting screws at the end of the tricopter arms.

The replaced plated steel springs were placed under the inboard arm mounting nut and washer and onto one of the pins in the leg assembly, see above. They don’t found anything in this configuration. The shock absorbing leg folds up so that the servo bracket etc take the bump when the tricopter lands… the most delicate part of the whole craft is unprotected. A temporary measure is some foam zip tied to the legs, but the whole shock absorbing leg is proving to be a bit of a worthless gimmick.
The kit lacked appropriate screws to fix the servo to its bracket and the servo crank to the ball link crank, in my case some 2mm hex head screws and nuts were used.
The one part of the frame that seems well done is the tail servo bearing and motor support. The system is free of backlash, and control is stable.
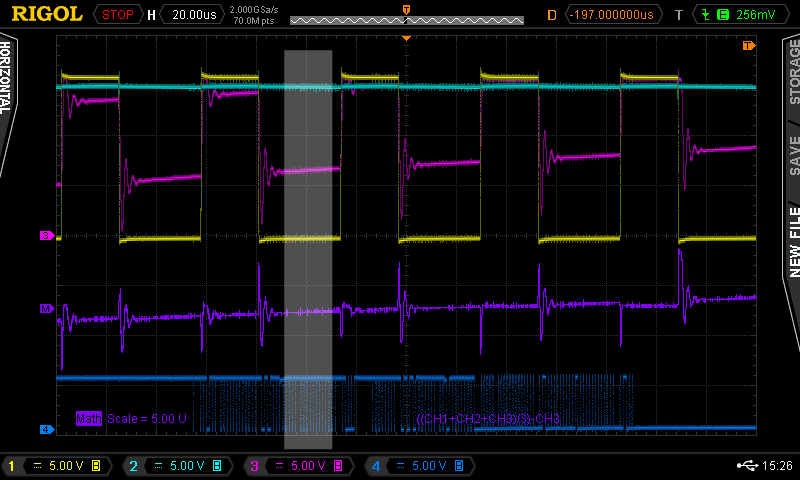
The ESCs were unwrapped, cables and JST-1.0mm attached to the C2 pads as permanent programming cables and longer motor wires fitted, re-wrapped and loaded with BLHeli Multi v11.0. The ESC was given a bench test on some challenging motors at 4S, and it was very responsive with no hint of sync problems.
The FC was loaded with Mutliwii 2.3 configured for a tricopter.
Initial flights have been good, the craft has plenty of power on a flat battery, is quite responsive for such long arms, and quite stable though tuning work continues. Expectation is that a 4S battery will allow carrying camera payload should that transpire.
More when it is tuned!
Last update: 16th February, 2014, 7:56 PM