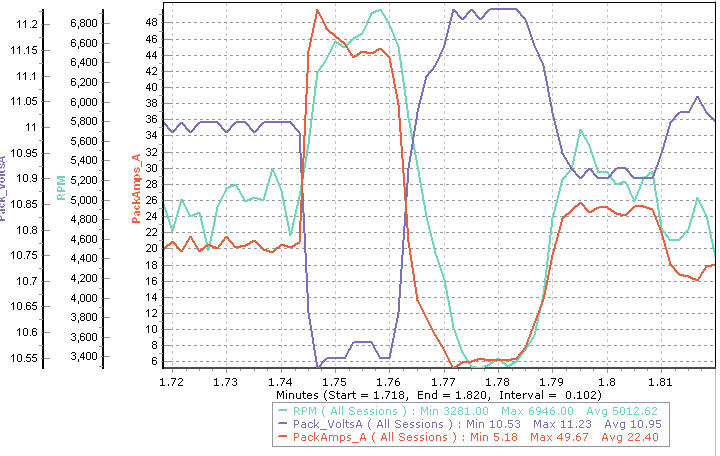
Tests on the tricopter using a data logger to capture motor speed, current and pack voltage gives an insight into platform operation.

Above, data capture from the tricopter on 3S. The datalogger adds 50g mass.
The plot shows the device hovering at about 5000rpm and 10.8A at 11V. Two WOT ascents were made to check acceleration and motor recovery during closed throttle descents. From idle, it takes about 500ms to accelerate to hover rpm. This test was repeated and the motor reliably restarted every time and the tumbling craft stabilised quickly. A set of 12×4.7SF props has been ordered to try at 3S to more fully load the motors.
Similar tests were conducted also on 4S, and peak current on WOT was 80A on 15.5V for 8500rpm. Operation on 4S would provide sufficient lift to carry a camera payload, but WOT operation exceeds the motor’s continuous current rating.
Last update: 4th February, 2014, 6:25 PM