This article documents a case study in use of Complementary PWM (COMP_PWM) to improve quadcopter stability at very low throttle.
An observation of two quadcopters of 450 size running several releases of Cleanflight and now Betaflight 3.01 is a loss of stability at very low throttle opening.
This is not uncommon for several reasons, and there is ‘airmode’ in both firmwares to address the problem that motors at minimum speed cannot be slowed further. Experience with airmode on Cleanflight up to v1.14.1 was that it raised throttle so much that descents were extremely slow sometimes, certainly never quick, and its use was discontinued.
I have since abandoned Cleanflight due to unresolved flight problems, lack of migration facility from version to version, and the quiet removal of the backup and restore facility.
The objective of this study was to explore the effect of enhanced motor braking with COMP_PWM on basic angle mode loop stability at low rpm.
Test scenario
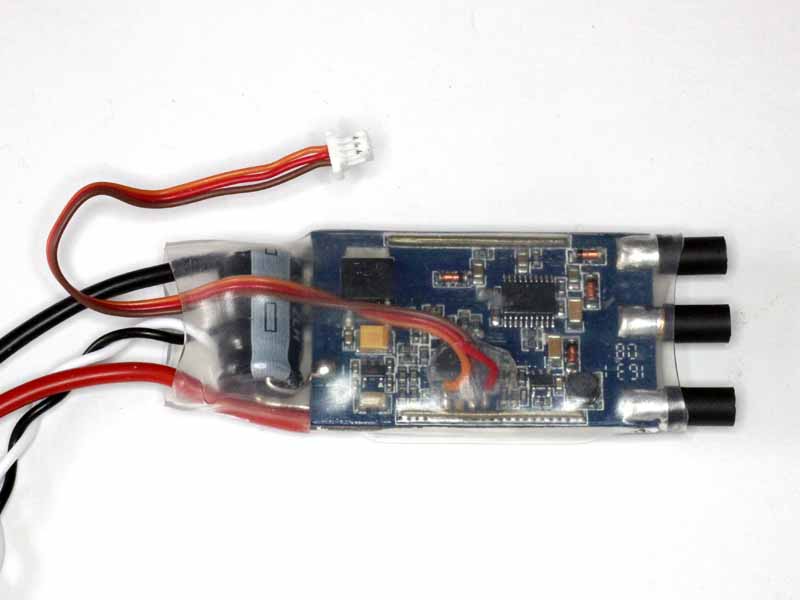
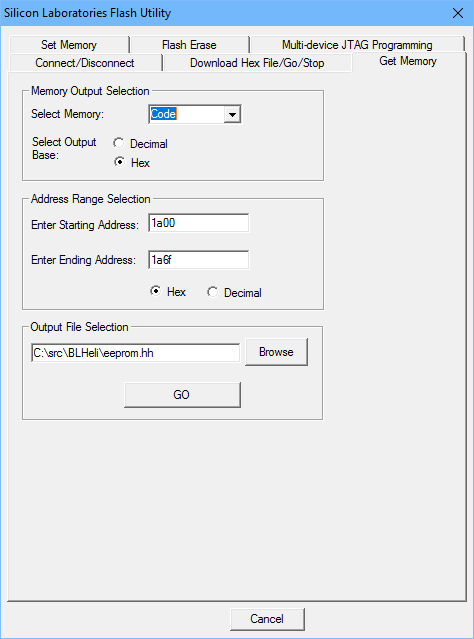
The study uses a BC3530 1100Kv motor with 11×4.7 SF propeller, F-30A ESC with SimonK (1e4c01782eff85da3971f628a3bd599b7a0725eb) with COMP_PWM enabled.
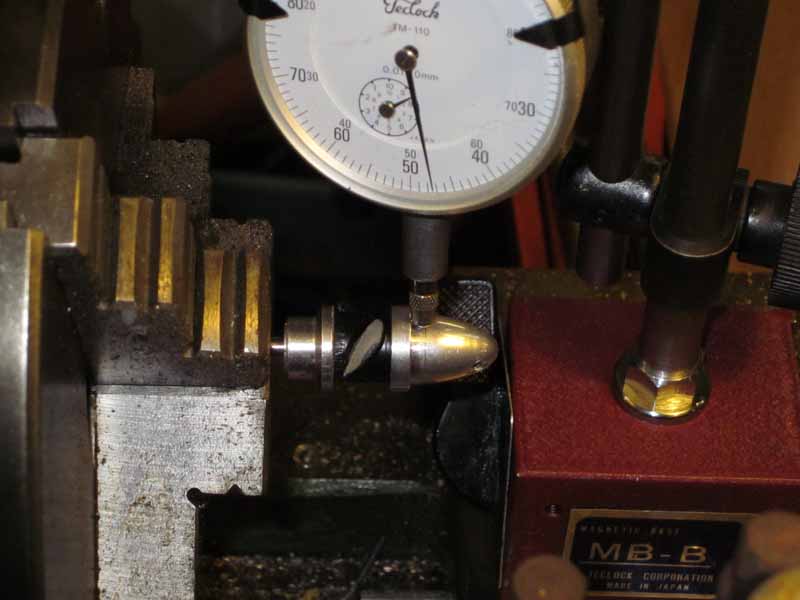
Tests were conducted with a script that I use consistently with asrg and eLogger to capture current and rpm, and all tests conducted at similar pressure, temperature and humidity, altitude is 700m.
Test results
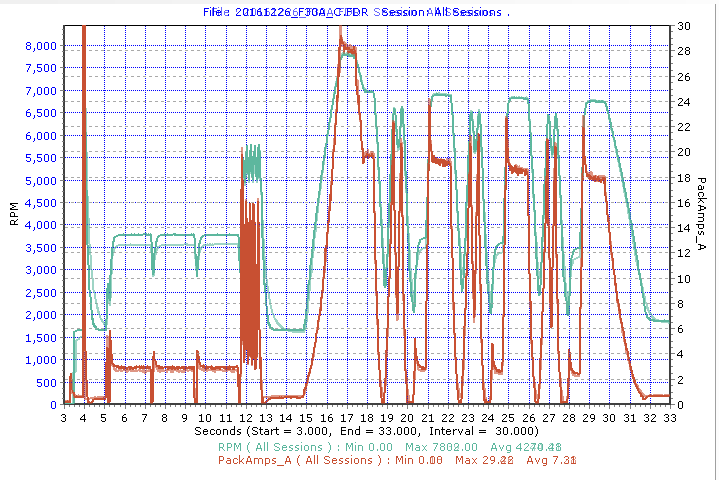
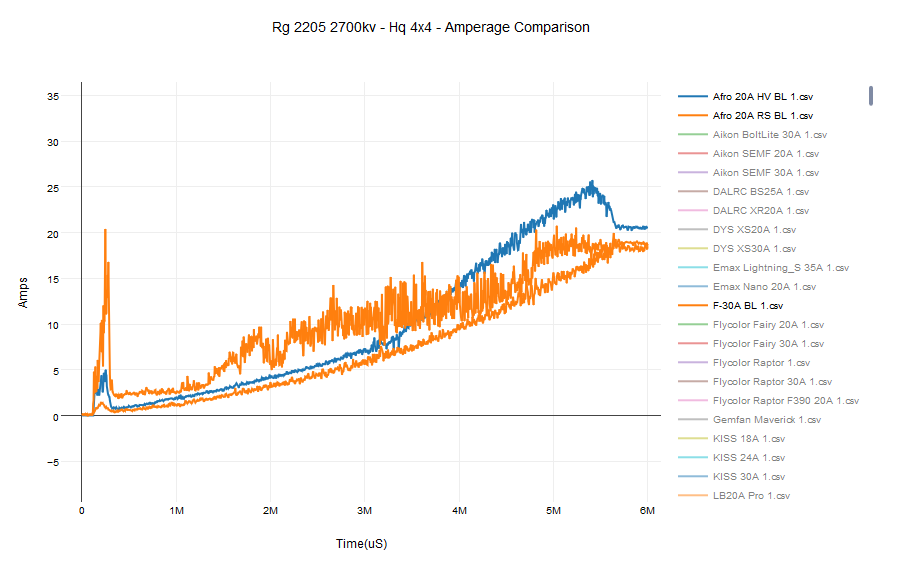
One of the effects of COMP_PWM is stronger braking of the motor when throttle is reduced. In multi-rotor application, the motor braking under COMP_PWM is dwarfed by the propeller load at maximum rpm, but propeller torque falls as the square of rpm and at lower speeds motor braking becomes more significant.
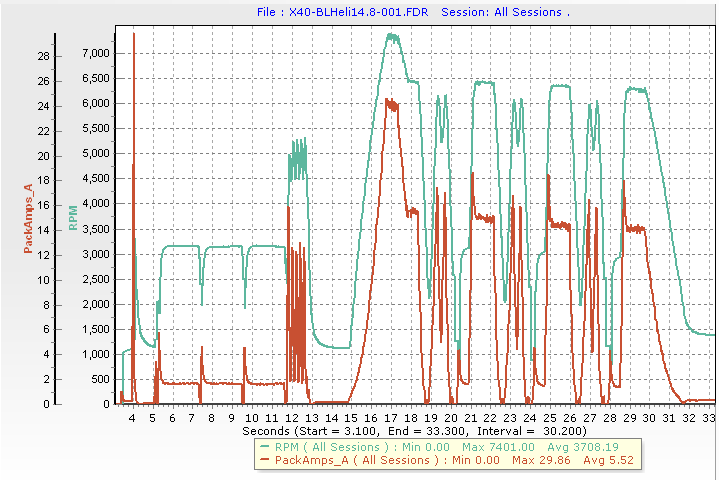
 Above is a graph of the drive response with a non-COMP_PWM response feint overlay. It can be seen at 13s, that under rapid deceleration, the COMP_PWM response differs, lets zoom in on that. Continue reading Improving quadcopter stability at very low throttle using Complementary PWM
Above is a graph of the drive response with a non-COMP_PWM response feint overlay. It can be seen at 13s, that under rapid deceleration, the COMP_PWM response differs, lets zoom in on that. Continue reading Improving quadcopter stability at very low throttle using Complementary PWM
Last update: 29th December, 2016, 7:40 AM