Overview
The Naze32 is hardly new, but it does seem to have reached a maturity where it, alternative firmware and the support tools are functional and fairly stable.
The article describes a project to fit a Naze32 to an existing quadcopter that used a Multiwii flight controller on a Atmega 328P platform, and initial perceptions.
The 32bit processor at 72MHz provides a lot more computing power than the old 8bit processor at 16MHz.
Implementation
An early decision was made to try Cleanflight as first option, as it appears to work well, is responsive for user issues, has a good PC client and is configurable from Arduino using the EZ-GUI client that I use for Multiwii.
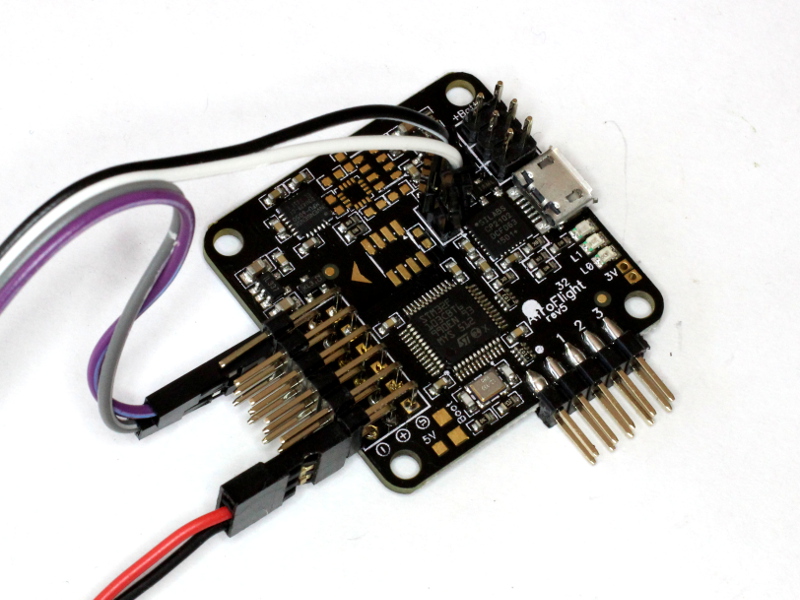 Above is the Naze32 undergoing Bluetooth testing before fitment to the quadcopter.
Above is the Naze32 undergoing Bluetooth testing before fitment to the quadcopter.

Above is the X-450 quad with Naze32/Cleanflight v1.10.0 controller.
Key elements of the configuration are:
- Hobbyking Q450 V3 quadcopter frame;
- Turnigy D2836-8 1000kv 14 pole Brushless Motor;
- F-30A ESC, loaded with SimonK tgy;
- RCTimer 10×4.5 two blade propellers;
- Naze32 (STM32F103CB) / Cleanflight v1.10.0;
- FRSKY V8FR-II HV receiver (to be replaced by Orange CPPM rx);
- Battery monitor;
- Turnigy Discovery Beeper
- Zippy 3000mAh 3S 30C LiPo battery;
- Turnigy 9XR PRO / OpenTx transmitter.
The mass of the fully populated quad is ~1200g.
Configuration
Configuration was straight forward and a minimum of change was made for evaluation purposes.
- install Chrome;
- install Cleanflight Configurator;
- install Cleanflight firmware;
- set channel order TAER (consistent with my other quads);
- Setup mode channel
- Multiwii 2.3 PID behaviour
- ESC calibration
Features lost in the basic ‘upgrade’ from M328P/MultiWii FC to ‘Acro; Naze32/Cleanflight:
- no compass;
- no baro;
- needs CPPM rx to connector GPS.
Some Naze32 boards have a baro and / or compass. In my experience, the baro was not very good on any 8bit Multiwii boards I tried, but may be better with 32bit power to reduce noise.
There are some ‘likes’:
- buzzer;
- support for an on-craft data logger.
Testing
Testing the quad in the hand in ‘acro’ mode and HORIZON mode gave rapid stable response using the defaults, so no intial tuning seemed required.
Trial flights on defaults were very encouraging, the platform twitched a bit in gusty wind but was stable in quiet conditions and responded quickly but stably to rapid joystick movements (both visually and in Cleanflight Configuration graphs).
To do
- CPPM receiver (ordered);
- OpenLog / Blackbox flight logger (ordered);
- further testing / tuning with independent acceleration logger and Blackbox logger.
All this depends of components from China, and delivery has become unreliable and slow.
Initial observations
- connection of Cleanflight configurator (USB and BT) and EZ-GUI have always been reliable;
- in HORIZON mode, max angle much higher than Multiwii default, probably higher than needed and I will probably change that.
Costs
- Naze32 controller and buzzer was about A$40 shipped;
- conversion to CPPM receiver requires a tx module and receiver, about A$80 shipped;
- OpenLog and microSD about A$29 inc shipping.
.